This is my self-balancing robot project, which uses a PID controller and an IMU to stay upright. Below are images and a video walkthrough of the system.
📸 Photos

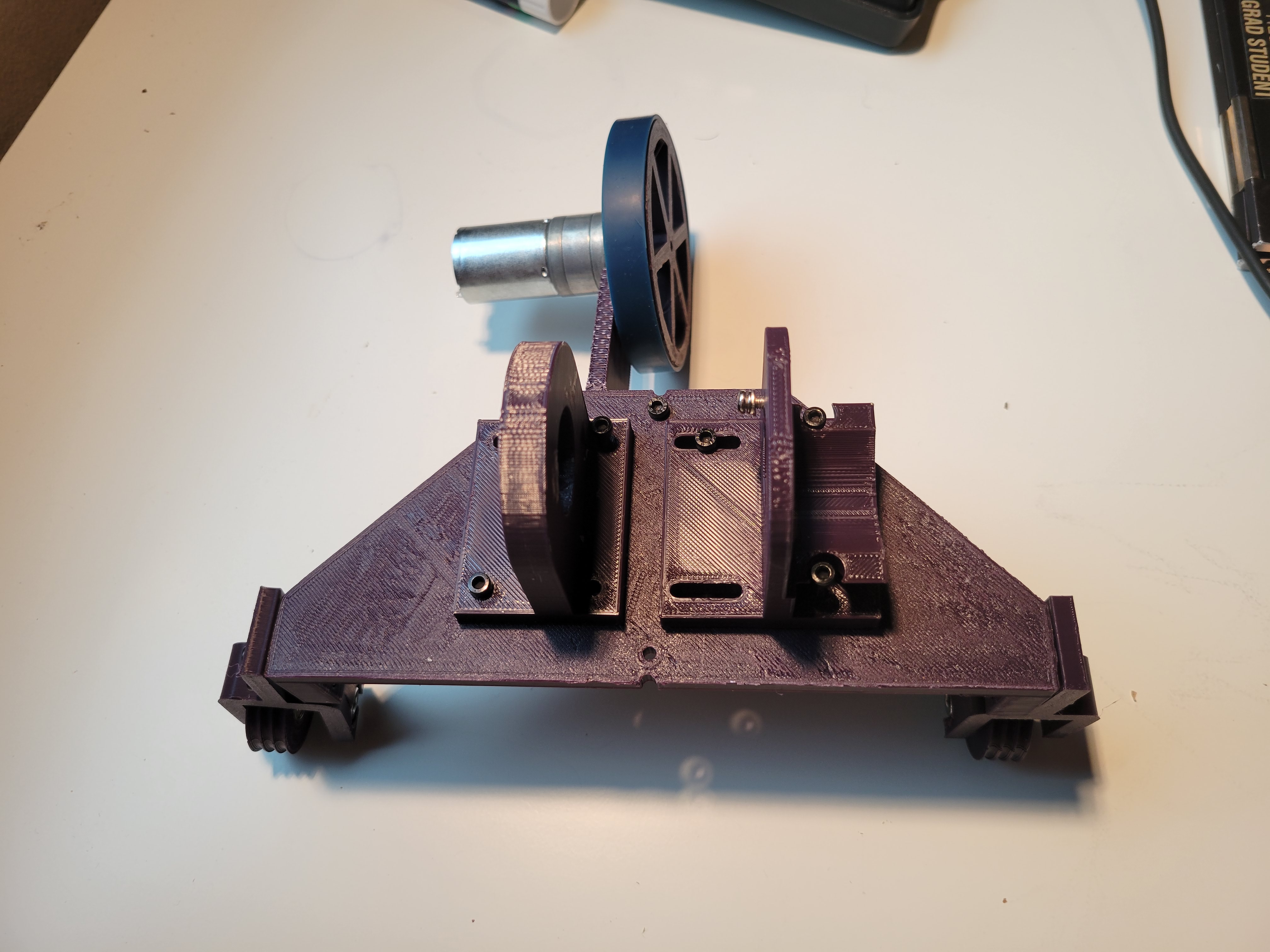
Front view of the robot

Back view with wiring and power pack
Close-up of the IMU used for stabilization
🎥 Demo Video
🛠️ Features
- Real-time balancing using MPU-6050
- PID tuning in Python
- Arduino + L298N motor control
- 3D-printed frame
🔗 Source Code
You can find the full code and CAD files here:
GitHub Repo